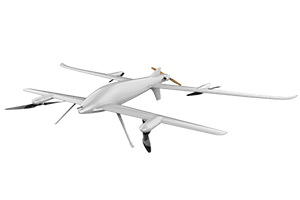

Military Applications
High altitude monitoring Air relay Battle command Electronic countermeasure Emergency communication Aerial lighting Combat simulation deductionFire Fighting Applications
High rise building fire fighting Forest fire fighting Disaster rescue Emergency lightingEducation & Research
Education and scientific researchAbout Us
Beijing Zhuoyi Intelligent Technology Co., Ltd., founded in 2015, is committed to the development, simulation, testing and training of unmanned systems. Headquartered in Beijing, the company has more than 3000m in Huailai ² Our production and R & D base is used for product R & D testing and production, and we have R & D centers in Xi'an, Chengdu, Hangzhou, Shenzhen, Changsha and other cities. For technology and products, Zhuoyi insists on taking innovation as the source power, adheres to the business philosophy of "innovation first, military quality", constantly cultivates, and has completely independent intellectual property products.




Unmanned System Simulation
EDA platform for unmanned system development

Combat Simulation Rehearsal
Autonomous and controllable unmanned combat system simulation platform

Flight Simulator
Meet the needs of routine flight experience training and speed up the aircraft development process

Light Electric Aircraft Simulator
Reduce pilot training cost and improve training efficiency